DIY Self Balancing Robot Circuit Diagram Make Kp, Ki, and Kd equal to zero. Adjust Kp. Too little Kp will make the robot fall over, because there's not enough correction. Too much Kp will make the robot go back and forth wildly. A good enough Kp will make the robot go slightly back and forth (or oscillate a little). Once the Kp is set, adjust Kd.

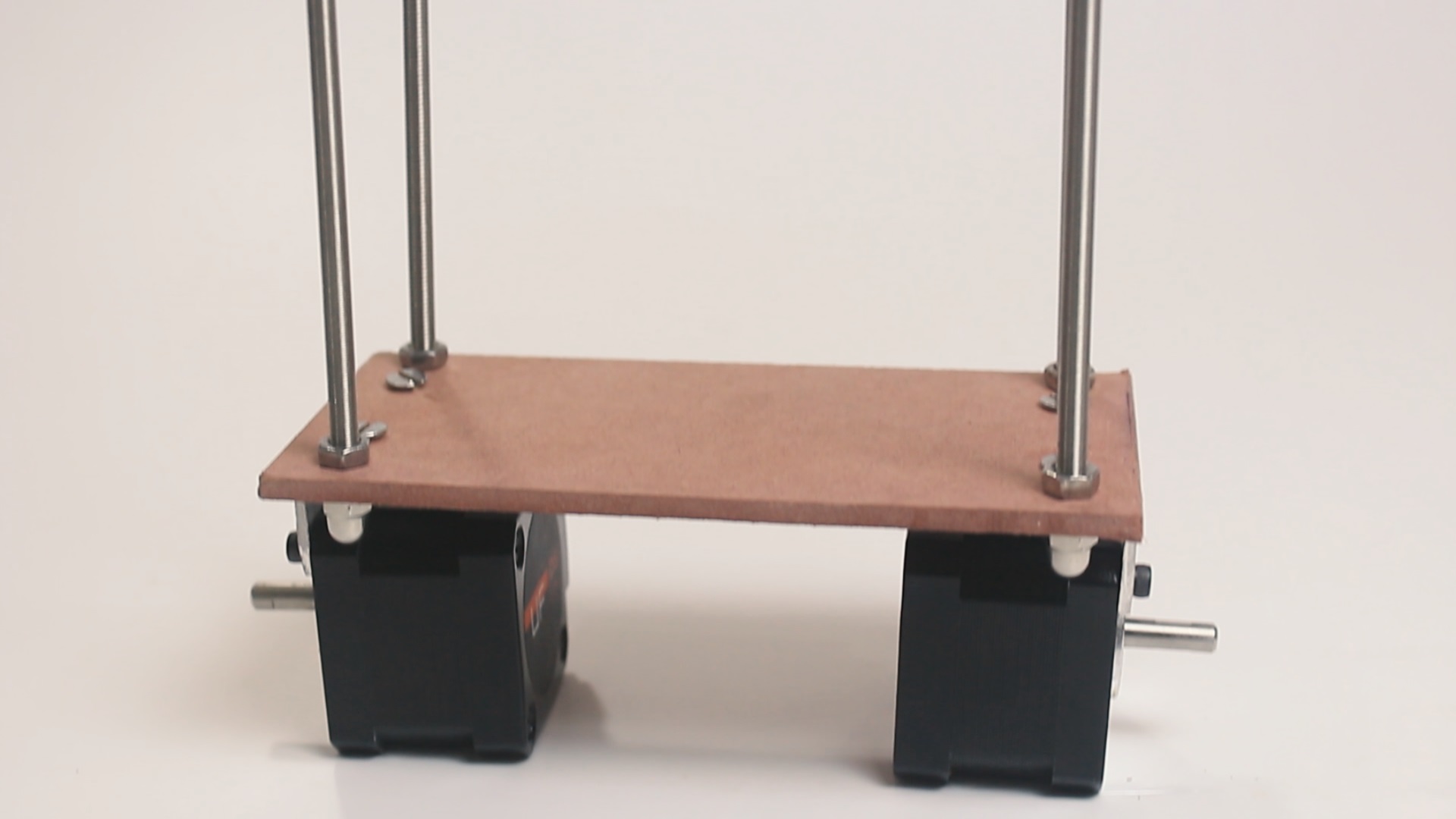
1. The physical structure of the robot is modified, so that the robot is much more robust and easier to control. The very early version is shown in the first picture, while the current version (2.0) is shown in the second picture. 2. An illustration of torque equilibrium of the robot is added. 3. A new program is written for PID tuning.
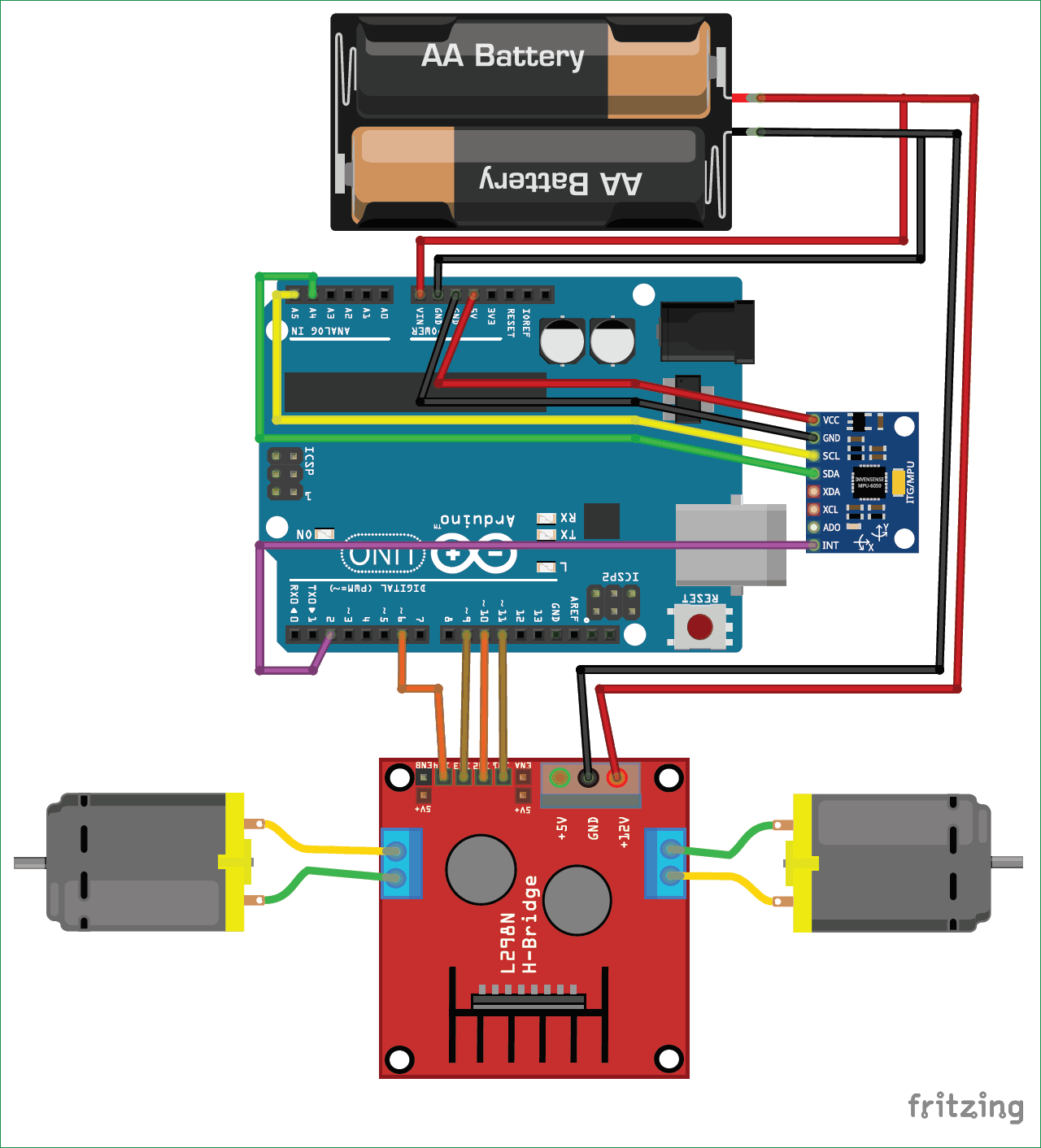
DIY Self Balancing Robot using Arduino Circuit Diagram
Now, at this stage, you should install the Arduino IDE on your Windows, Linux, or Mac computer.. Return to Table of Contents. Test the Motors. Let's test the motors to make sure they work. Plug the Arduino into the USB port of your computer using the USB cord.
We will show you how you can create your own self-balancing robot that can also avoid obstacle along its path. We will be using a Arduino Uno board and a MPU6050 accelerometer-gyroscope. You will understand how the MPU6050 works with an Arduino Uno, measure the inclination angle of the robot, PID loop to make the robot stay balanced. Self Balancing Robot is a two-wheeler automated robot that can balance itself from falling to the ground. This is similar to other typical two-wheeled self balancing robots, such as the Segway. Its function is to maintain balance using the motor's axis movement of the wheels and body. Types of self-balancing robots. There are several types of

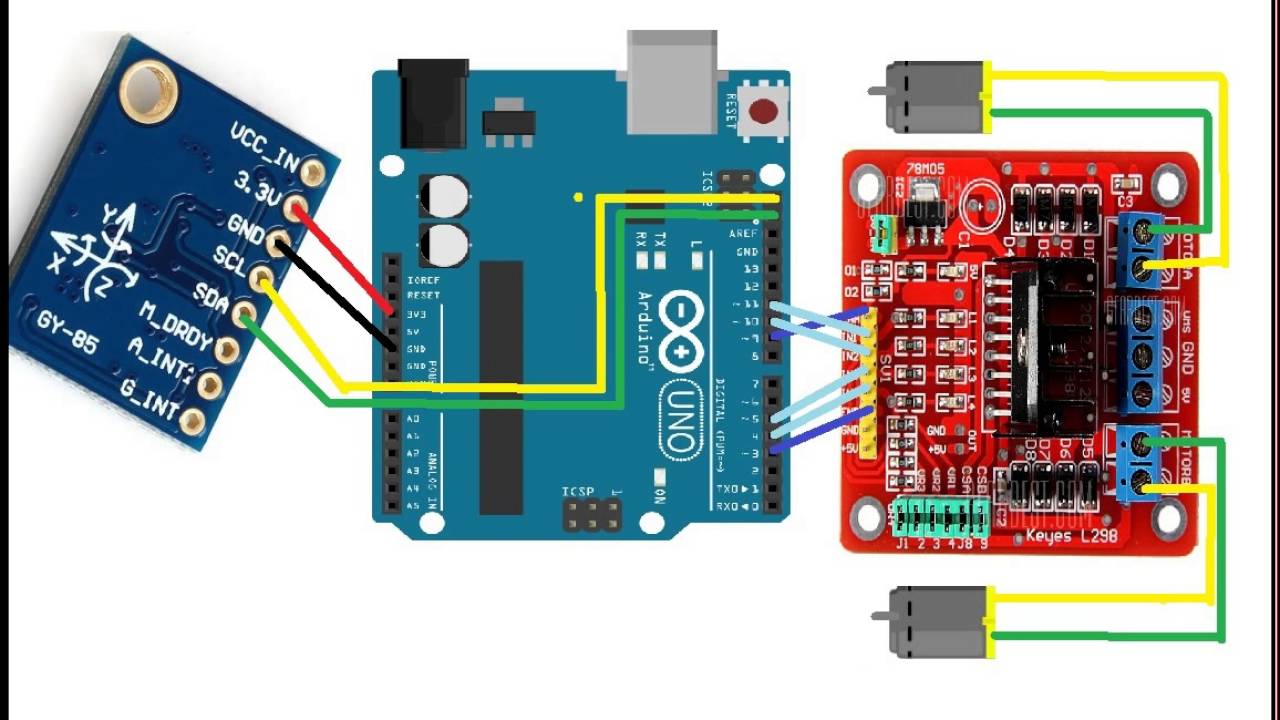
Self Balancing Robot Circuit Diagram
Self Balancing Robot Using Arduino: Self balancing robot is an example of arduino project. A balancing robot comes under the category of autonomous project, where the robot tries to balance itself by using the gyroscope sensor MPU 6050. You can make the circuit at your home by using vero board or you can directly order a PCB from any PCB